當中有很多版本,從{多桿件設定與測試} →{多桿件回位設定與測試}→{導入電腦對打&第二桿件電腦判斷添加}→{加入電腦對打&第二及三桿件電腦對打code}→{第四桿件電腦回擊設定}→{球重生&左下計分},沒意外下個版本就可以結束了。((全寫在lua中
影片是照順序放der
檔案也是1→2→3→4→5→6
目前最新版本
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
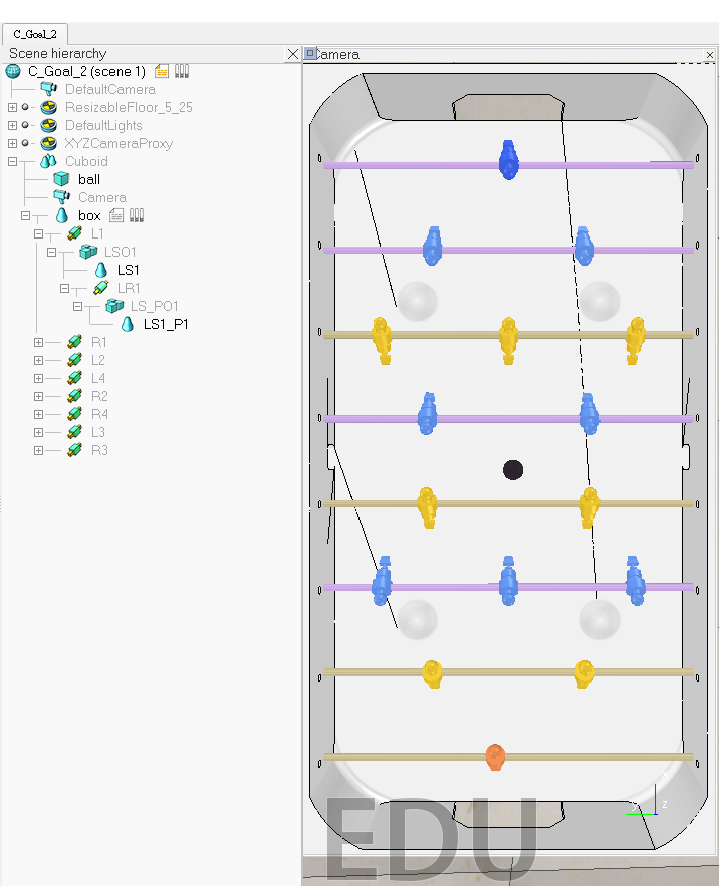
| function sysCall_init() Ball=sim.getObjectHandle('ball') --player-- Slide_rail= sim.getObjectHandle('R1') Roller= sim.getObjectHandle('RR1') Slide_rail2= sim.getObjectHandle('R2') Roller2= sim.getObjectHandle('RR2') Slide_rail3= sim.getObjectHandle('R3') Roller3= sim.getObjectHandle('RR3') Slide_rail4= sim.getObjectHandle('R4') Roller4= sim.getObjectHandle('RR4') Slide_rail_v=0 Roller_v=0 Roller_v2=0 Roller_v3=0 Roller_v4=0 dVel=0.5 --computer-- Body=sim.getObjectHandle('LSO1') Body2=sim.getObjectHandle('LSO2') Body3=sim.getObjectHandle('LSO3') Body4=sim.getObjectHandle('LSO4')-- test=sim.getObjectHandle('LS3_P1') LR1=sim.getObjectHandle('LR1') LR2=sim.getObjectHandle('LR2') LR3=sim.getObjectHandle('LL3') LR4=sim.getObjectHandle('LR4') L1=sim.getObjectHandle('L1') L2=sim.getObjectHandle('L2') L3=sim.getObjectHandle('L3') L4=sim.getObjectHandle('L4') --goal-- Player_G = 0 Computer_G = 0endfunction sysCall_actuation() --player-- A= sim.getObjectHandle('RS1_PO1') --auto_return--1 PA= sim.getObjectPosition(A,-1) if PA[1] >= -0.712 then Roller_v = Roller_v + dVel*3 end B= sim.getObjectHandle('RS2_PO1') --auto_return--2 PB= sim.getObjectPosition(B,-1) if PB[1] >= -0.531 then Roller_v2 = Roller_v2 + dVel*3 end C= sim.getObjectHandle('RS4_PO2') --auto_return--3 PC= sim.getObjectPosition(C,-1) if PC[1] >= -0.197 then Roller_v3=Roller_v3 + dVel*5 end D= sim.getObjectHandle('RS3_PO1') --auto_return--4 PD= sim.getObjectPosition(D,-1) if PD[1] >= 0.137 then Roller_v4=Roller_v4 + dVel*5 end message,auxiliaryData=sim.getSimulatorMessage() while message~=-1 do if (message==sim.message_keypress) then if (auxiliaryData[1]==32) then --"space"--restart sim.setObjectPosition(Ball,-1,{-0.1429, -0.1334, 0.5}) end if (auxiliaryData[1]==122) then --"z"--goalkeeper Roller_v = Roller_v - dVel*50 if (Roller_v > 0) then Roller_v = 0 end end if (auxiliaryData[1]==120) then --"x"--2 Roller_v2 = Roller_v2 - dVel*30 if (Roller_v2 > 0) then Roller_v2 = 0 end end if (auxiliaryData[1]==99) then --"c"--3 Roller_v3 = Roller_v3 - dVel*30 if (Roller_v3 > 0) then Roller_v3 = 0 end end if (auxiliaryData[1]==118) then --"v"--4 Roller_v4 = Roller_v4 - dVel*30 if (Roller_v4 > 0) then Roller_v4 = 0 end end if (auxiliaryData[1]==2008) then --"down"--return_player Roller_v = Roller_v + dVel*20 Roller_v2 = Roller_v2 + dVel*20 Roller_v3 = Roller_v3 + dVel*20 Roller_v4 = Roller_v4 + dVel*20 if (Roller_v < 0) then Roller_v = 0 end if (Roller_v2 < 0) then Roller_v2 = 0 end if (Roller_v3 < 0) then Roller_v3 = 0 end if (Roller_v4 < 0) then Roller_v4 = 0 end end if (auxiliaryData[1]==2009) then --"right" Slide_rail_v = Slide_rail_v + dVel/5 if (Slide_rail_v < 0) then Slide_rail_v = 0 end end if (auxiliaryData[1]==2010) then --"left" Slide_rail_v = Slide_rail_v - dVel/5 if (Slide_rail_v > 0) then Slide_rail_v = 0 end end end message,auxiliaryData=sim.getSimulatorMessage() end Slide_rail_v2 = Slide_rail_v/1.3 Slide_rail_v3 = Slide_rail_v/1.5 Slide_rail_v4 = Slide_rail_v/1.4 sim.setJointTargetVelocity(Slide_rail,Slide_rail_v) sim.setJointTargetVelocity(Roller,Roller_v) sim.setJointTargetVelocity(Slide_rail2,Slide_rail_v2) sim.setJointTargetVelocity(Roller2,Roller_v2) sim.setJointTargetVelocity(Slide_rail3,Slide_rail_v3) sim.setJointTargetVelocity(Roller3,Roller_v4) sim.setJointTargetVelocity(Slide_rail4,Slide_rail_v4) sim.setJointTargetVelocity(Roller4,Roller_v3) --computer-- Body_s = sim.getObjectPosition(Body,-1) Ball_s = sim.getObjectPosition(Ball,-1) X = Body_s[1] - Ball_s[1] Y = Body_s[2] - Ball_s[2] if 1 then --C_goalkeeper if X <= 0.02 then sim.setJointTargetVelocity(LR1,-5) sim.setJointTargetVelocity(L1,0) elseif X > 0.02 or X <= 0.01 then sim.setJointTargetVelocity(LR1,5) YYYYY = Y*7 sim.setJointTargetVelocity(L1,YYYYY) end--[[ if X <= 0.02 and Y <= 0 then --old_version sim.setJointTargetVelocity(LR1,-5) elseif X > 0.02 and Y <= 0 then sim.setJointTargetVelocity(LR1,2) elseif X <= 0.02 and Y > 0 then 40623130 sim.setJointTargetVelocity(LR1,-5) elseif X > 0.02 and Y > 0 then sim.setJointTargetVelocity(LR1,2) end]] end Body_s2 = sim.getObjectPosition(Body2,-1) X2_1 = Body_s2[1] - Ball_s[1] Y2_1 = Body_s2[2] - Ball_s[2] - 0.15 Y2_2 = Body_s2[2] - Ball_s[2] + 0.15 if X2_1 >= 0.02 then --C_second-- if Ball_s[2] <= -0.133 then C_K_B_X2() Y2_1 = Y2_1*5 sim.setJointTargetVelocity(L2,Y2_1) elseif Ball_s[2] > -0.133 then C_K_B_X2() Y2_2 = Y2_2*5 sim.setJointTargetVelocity(L2,Y2_2) end end Body_s4 = sim.getObjectPosition(Body4,-1) X4_1 = Body_s4[1] - Ball_s[1] Y4_1 = Body_s4[2] - Ball_s[2] - 0.15 Y4_2 = Body_s4[2] - Ball_s[2] + 0.15 if X4_1 >= 0.02 then --C_third-- if Ball_s[2] <= -0.133 then C_K_B_X4() Y4_1 = Y4_1*3 sim.setJointTargetVelocity(L4,Y4_1) elseif Ball_s[2] > -0.133 then C_K_B_X4() Y4_2 = Y4_2*3 sim.setJointTargetVelocity(L4,Y4_2) end end--[[ test_s = sim.getObjectPosition(test,-1) M = test_s[2]- Ball_s[2] print(M)--]] Body_s3 = sim.getObjectPosition(Body3,-1) X3_1 = Body_s3[1] - Ball_s[1] Y3_1 = Body_s3[2] - Ball_s[2] Y3_2 = Body_s3[2] - Ball_s[2] +0.2487 Y3_3 = Body_s3[2] - Ball_s[2] -0.2487 if X3_1 >= 0.02 then --C_fourth-- if Ball_s[2] < -0.0028 and Ball_s[2] >= -0.2487 then C_K_B_X3() Y3_1 = Y3_1*2 sim.setJointTargetVelocity(L3,Y3_1) elseif Ball_s[2] >= -0.0028 then C_K_B_X3() Y3_2 = Y3_2*2 sim.setJointTargetVelocity(L3,Y3_2) elseif Ball_s[2] < -0.2487 then C_K_B_X3() Y3_3 = Y3_3*2 sim.setJointTargetVelocity(L3,Y3_3) end end --reborn_ball & count goal-- if Ball_s[1] < -0.85 then Player_G = Player_G + 1 end if Ball_s[1] >= 0.61 then Computer_G = Computer_G+1 end if Ball_s[1] < -0.85 or Ball_s[1] >= 0.61 then sim.setObjectPosition(Ball,-1,{-0.1429, -0.1334, 0.5}) print[[Player:Computer]] print(' '..Computer_G..' '..Player_G) endendfunction C_K_B_X2() --C_second_kick-- if X2_1 < 0.03 then sim.setJointTargetVelocity(LR2,-5) elseif X2_1 > 0.03 then sim.setJointTargetVelocity(LR2,5) endendfunction C_K_B_X3() --C_third_kcik-- if X3_1 < 0.03 then sim.setJointTargetVelocity(LR3,-5) elseif X3_1 > 0.03 then sim.setJointTargetVelocity(LR3,5) endendfunction C_K_B_X4() --C_fourth_kick-- if X4_1 < 0.03 then sim.setJointTargetVelocity(LR4,-5) elseif X4_1 > 0.03 then sim.setJointTargetVelocity(LR4,5) endend |



沒有留言:
張貼留言
請輸入...